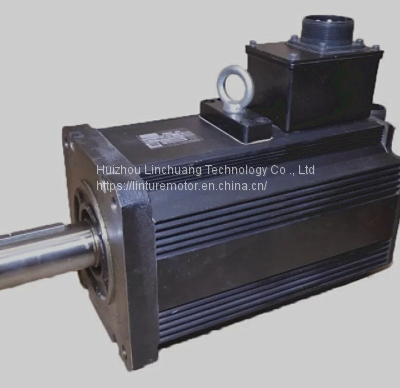
OMRON R88M-GP20030H-S2-Z AC Servomotor , With INC Encoder Flat-Style 200W , 200 VAC , With Key / With Brake , 3000rpm3,000-r/min Flat Servomotors
| Model (R88M-) | 100 VAC | 200 VAC |
|---|
| GP10030L | GP20030L | GP40030L | GP10030H | GP20030H | GP40030H |
|---|
| Item | Unit | GP10030S | GP20030S | GP40030S | GP10030T | GP20030T | GP40030T |
|---|
| Rated output *1 | W | 100 | 200 | 400 | 100 | 200 | 400 |
|---|
| Rated torque *1 | N·m | 0.32 | 0.64 | 1.3 | 0.32 | 0.64 | 1.3 |
|---|
| Rated rotation speed | r/min | 3000 |
|---|
Max. momentary rotation
speed | r/min | 5000 | 4500 | 5000 |
|---|
| Max. momentary torque *1 | N·m | 0.84 | 1.8 | 3.6 | 0.86 | 1.8 | 3.65 |
|---|
| Rated current *1 | A (rms) | 1.6 | 2.5 | 4.4 | 1 | 1.6 | 2.5 |
|---|
Max. momentary current
*1 | A (rms) | 4.9 | 7.5 | 13.3 | 3.1 | 4.9 | 7.5 |
|---|
| Rotor inertia | kg·m2
(GD2/4) | 1.0 × 10-5 | 3.5 × 10-5 | 6.5 × 10-5 | 1.0 × 10-5 | 3.5 × 10-5 | 6.4 × 10-5 |
|---|
| Applicable load inertia | --- | 20 times the rotor inertia max. *2 |
|---|
| Torque constant *1 | N·m/A | 0.21 | 0.27 | 0.3 | 0.34 | 0.42 | 0.54 |
|---|
| Power rate *1 | kW/s | 10.2 | 11.7 | 26.0 | 10.2 | 11.5 | 25.5 |
|---|
| Mechanical time constant | ms | 0.87 | 0.75 | 0.55 | 1.05 | 0.81 | 0.59 |
|---|
| Electrical time constant | ms | 3.4 | 6.7 | 6.7 | 2.9 | 5.6 | 6.6 |
|---|
| Allowable radial load *3 | N | 68 | 245 | 245 | 68 | 245 | 245 |
|---|
| Allowable thrust load *3 | N | 58 | 98 | 98 | 58 | 98 | 98 |
|---|
| Weight | Without brake | kg | Approx. 0.7 | Approx. 1.3 | Approx. 1.8 | Approx. 0.7 | Approx. 1.3 | Approx. 1.8 |
|---|
| With brake | kg | Approx. 0.9 | Approx. 2 | Approx. 2.5 | Approx. 0.9 | Approx. 2 | Approx. 2.5 |
|---|
| Radiation shield dimensions (material) | 130 × 120
× t10 (AI) | 170 × 160 × t12 (AI) | 130 × 120
× t10 (AI) | 170 × 160 × t12 (AI) |
|---|
| Applicable Servo Drives (R88D-) | GT01L | GT02L | GT04L | GT01H | GT02H | GT04H |
|---|
Brake
spec-
ifica-
tions | Brake inertia | kg·m2
(GD2/4) | 3 × 10-6 | 9 × 10-6 | 3 × 10-6 | 9 × 10-6 |
|---|
Excitation voltage
*4 | V | 24 VDC ± 10% |
|---|
Power
consumption
(at 20 °C) | W | 7 | 10 | 7 | 10 |
|---|
Current
consumption
(at 20 °C) | A | 0.29 | 0.41 | 0.29 | 0.41 |
|---|
Static friction
torque | N·m | 0.29 min. | 0.29 min. | 1.27 min. |
|---|
Attraction time
*5 | ms | 50 max. | 50 max. | 60 max. |
|---|
| Release time *5 | ms | 15 max. |
|---|
| Backlash |
| ± 1 ° |
|---|
Allowable work per
braking | J | 137 | 196 | 137 | 196 |
|---|
| Allowable total work | J | 44.1 × 103 | 147 × 103 | 44.1 × 103 | 147 × 103 |
|---|
Allowable angular
acceleration | rad/s2 | 10,000 max.
(Speed of 900 r/min or more must not be changed in less than 10 ms) |
|---|
| Brake life | --- | 10,000,000 operations min. |
|---|
| Rating | --- | Continuous | Continuous |
|---|
| Insulation grade | --- | Type F |
|---|
*1. These are the values when the Servomotor is combined with a Servo Drive at room temperature (20°C, 65%). The
maximum momentary torque shown above indicates the standard value.
*2. Applicable Load Inertia:
• The operable load inertia ratio (load inertia/rotor inertia) depends on the mechanical configuration and its rigidity.
For a machine with high rigidity, operation is possible even with high load inertia. Select an appropriate motor and
confirm that operation is possible.
• If the dynamic brake is activated frequently with high load inertia, the dynamic brake resistor may burn. Do not
repeatedly turn the Servomotor ON and OFF while the dynamic brake is enabled.
• The dynamic brake is designed only for emergency stops. Design the system so that the Servomotor remains
stopped for at least 3 minutes after applying the dynamic brake. Otherwise the dynamic brake circuits may fail.
*3. The allowable radial and thrust loads are the values determined for a service life of 20,000 hours at normal operating
temperatures. The allowable radial loads are applied as shown in the following diagram.
*4. This is an OFF brake. (It is reset when excitation voltage is applied).
*5. The operation time is the value (reference value) measured with a surge suppressor (CR50500 manufactured by
Okaya Electric Industries Co., Ltd.).




















 Facebook
Facebook
 X
X
 Pinterest
Pinterest
 Linkedln
Linkedln