robotic manipulator Material removal robot Foreign Object Removal Robot Robot Arm
100000 - 200000 /Set
Min.Order:1 Set
Quick Details View All >
Hefei Mingde Optoelectronic Technology Co.,ltd.

deep learning platform 6 Axis Mining Robot Arm Robotic manipulator material removal robot


heavy duty 6 channels Artificial Intelligentce AI ore sorting machine mineral separator

heavy duty Ore color sorter MS-TD6 Heavy-duty AI ore sorting machine mineral separator MAI-TD6
separating cobblestone pebbles heavy duty Ore color sorter MS-TD6 mineral separator
Product Details

Product Overview
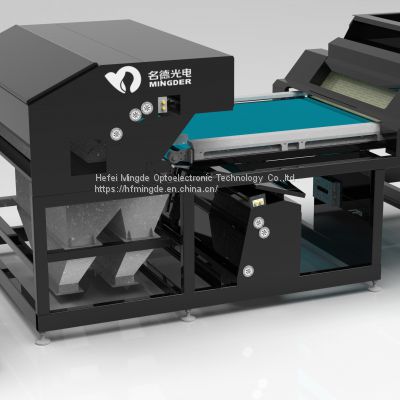
In the process of mining and transportation, ores are often mixed with wood, steel nails, rags, plastic parts, waste filling pipes and other sundries. These sundries has seriously affected the safety and effectiveness of equipment in the transportation, crushing, grinding and beneficiation . In the past, manual sorting was usually used to remove it, but there are serious safety and occupational health risks in manual sorting, as well as problems such as incomplete manual sorting. The robot for mining can effectively solve the above problems.
Through a multi angle, multi-dimensional stereo high-precision camera, the intelligent robot sorter quickly scans the ore on the conveyor belt. The self-developed CRM-CNN foreign object recognition algorithm accurately locates the 3D position of the debris, controls the robot to grab the foreign object, and puts it into the foreign object collection box.
Product characteristics
1: Based on deep learning technology ,combined with a large database of ore foreign objects, The intelligent robot sorter has a high foreign object recognition rate.
2: Using multi-angle and multi-dimensional industrial stereo camera and geometric 3D recognition algorithm, the intelligent robot sorting machine can accurately measure and position the depth, direction and position of foreign objects.
3: Highly flexible control, for the newly emerged foreign objects can be added at any time.
4: Specially developed high protection levels robot arm, faster and more flexible, can effectively adapt to various conveying speeds and harsh industrial environments
5: Highly intelligent, unattended and optional remote monitoring
Technical parameters
The machine body mainly includes 6 parts:
1: Robot, can be configured more than one, Multiple robots can be configured according to the capture time.
2: Control cabinet, including robot control box and PLC control cabinet
3: Visual acquisition, including lens, light source and control box
4: Algorithm IPC, UPS
5: Remote operation platform/dispatching room monitoring, including video monitoring, remote HMI, etc. (This function is optional)
6: Guardrail, including safety door interlock and mechanical arm emergency stop control (optional).
Structure | 6-axis industrial manipulator+deep learning control platform |
Sorting range | stones, wood blocks, plastic bottles and other sundries |
Camera brand | Mingde |
Recognition principle | deep learning neural network, and modeling of foreign objects extracted as required |
Grab | quick change bionic mechanical claw |
Power supply | industry 380V, three-phase five wire |
Air supply | >0.5MPA |
The grabbing capacity | Manipulators shall be configured according to the maximum weight of objects to be grasped on site |
Belt speed | >1.3 m/s |
Belt speed | <1.8 m/sec |
Track width | <2500mm |
Power supply | 380V,Three-phase five-wire. |
Air supply | >0.5MPA |
Total Weight | 850kg |
Dimension | 2350×1100×2000 |
Gripping Diameter | ≥1CM |
Protective level | IP65 |
Vision system | CRM-CNN |
Rated power | 6KW(single robot configuration) |
Contact Supplier

You May Like
New Products










Popular Searches
Recommended Products
Find Similar Products By Category





 Facebook
Facebook
 X
X
 Pinterest
Pinterest
 Linkedln
Linkedln