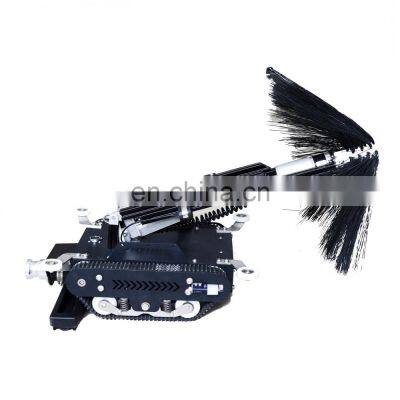
Underwater dredging used intelligent robot chassis underwater crawler platform
Negotiable
Min.Order:1
Zhengzhou Ledy Optical-Electrical Technology Co., Ltd.
Product Details
We also produce customized product applications: Underwater dredging robot, Wringing and suction robot, ect.
Introduction:
It uses generator or 380V power supply, mainly for maximum 30m depth underwater operations, secondary development and customized services are provided.
Application:
1. Underwater dredging robot: used for cleaning the silt in the breeding pond and sedimentation tank.
2. Wringing and suction robot: underwater excavation, dredging
3. Harvesting of aquatic products: mainly used for the harvest of lotus root, horseshoe, mushroom, and other aquatic crops.
Features:
1. Matilda suspension system can buffer the impact of steps, fit the undulating terrain, has an excellent low-speed shock absorption effect. The two wheels share the absorbing spring, with less wearing parts and high reliability.
2. Integrated welded frame body, solid structure, light weight, the whole chassis is sprayed and rust-proof.
3. The power transmission components are oil-filled and waterproof, long-term reliable, and resistant to water depth of 30 meters.
4. Standard industrial rubber track, durable and easy to replace
5. High-molecular material pulleys (molecular weight greater than 5 million), high strength, strong water resistance, greatly reducing the total weight.
6. Modular design, convenient for users to upgrade and transform.
7. Power system: generator or civil power supply.
8. 2 control modes optional:
(1) Handheld remote controller+normal control box mode: No secondary development, or simply support the remote control receiver with reserved control channel PWM signal, does not support video and voice channel.
(2) Visual control box mode: 4 wired video signals, 13 PWM steering gear control signals, expansion of underwater equipment can be customized and developed.
|
Characteristics |
||
|
Control characteristics |
Way to control |
Speed control (PV), position control (PP), IP, CSP, CSV, CST |
|
Support motor |
Waterproof AC torque motor |
|
|
Vehicle control accuracy |
±0.1m |
|
|
Speed control accuracy |
±0.05m/s |
|
|
Communication Interface |
RS-485 |
Standard ModBus protocol |
|
CanOpen |
Standard CanOpen protocol, CiA301/402 |
|
|
EtherCAT |
no |
|
|
Encoder type |
Encoder port |
2500P/R |
|
|
Ambient temperature |
-20℃—50℃, use derating when it is higher than 40℃ |
|
Altitude |
30 meters underwater, derating for use above 1000m |
|
|
vibration |
Less than 0.5G (4.9m/s2), less than 10Hz |
|
|
Storage temperature |
-40℃—70℃ |
|
Specification:
|
Item |
Data |
Item |
Data |
|
1220*890*520mm |
Speed |
2.5-4KM/h |
|
|
Self Weight |
120kg |
Designed Load |
100-300kg |
|
Waterproof |
IP68 |
Rated Torque |
|
|
Track Width |
130mm |
Reducer Efficiency |
65-85% |
|
Gear Ratio |
1:10-1:40 |
Motor Voltage |
380ACV (customized as local voltage) |
|
Motor |
Climbing Ability |
≤30°(can climb stairs) |
|
|
Motor Rated Speed |
1500r/min |
Maximum Span |
620mm |
|
Cable Control Distance |
Standard 50m, maximum 150m |
130mm |
|
|
30m |
Power Supply |
Generator or 380V power supply |

You May Like
New Products











Popular Searches
Recommended Products
Find Similar Products By Category
















 Facebook
Facebook
 X
X
 Pinterest
Pinterest
 Linkedln
Linkedln