UIM24208-SP Stepper motor controller CAN bus networking/ programmable/ sensor supportive
Negotiable /Piece
Min.Order:10 Pieces
Quick Details View All >
Shanghai United Intelligence Robotics Inc
Product Details
programmable motor controller
Motor Drive Characteristics
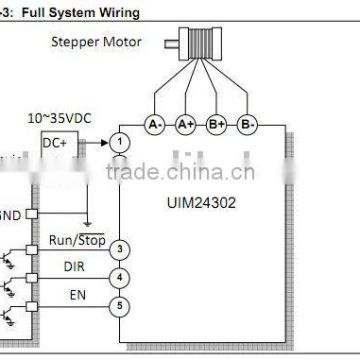
− Wide supply voltage range 12 ~ 40VDC
− Output current 4/8A, instruction adjustable
− Full to 16th micro-step resolution
− Dual full H-bridge with PWM constant current control
− Accurate micro-stepping and current control, 6600 RPM max speed for NEMA 17 motor (half-step) and 4000 RPM for NEMA 17/23 motor (quad-step).
CAN2.0B Active Communication
− 2-wire interface
− Max 1M bps operation, long distance
− Differential bus, high noise immunity
− Max 100 nodes
Embedded DSP Microprocessor
− Embedded 64-bit calculation precision high-performance digital signal processing micro controller
− Absolute position counter, reset by instruction or sensor input
− Advanced motion control module, from 0 to 4000 RPM in 0.25s and from 0 to 6600 RPM in 0.5s (for NEMA17/23)
− 3 digital inputs, 1 can be configured to analog input (12bit)
− 1 TTL output, controlled by 3 events or instruction
− 12 real-time event based change notifications (similar to interrupters)
− 5 programmable actions triggered by 8 sensor events
− Simple, intuitive, rich instructions
− User-friendly interface
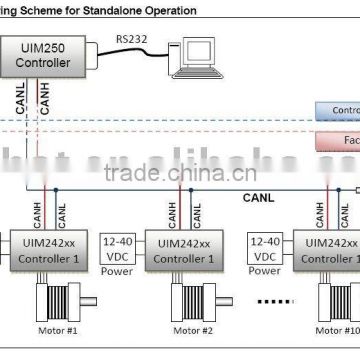
1.1.1 Communication
Through a CAN-RS232 converter (i.e. UIM2501), user device can command multiple UIM242 controllers through RS232 using ASCII coded instructions. The UIM2501 translates the instructions from RS232 to CAN2.0B and sends the instructions to the target controller according to the controller ID that specified by the user device.
1.1.2 Basic Motion Control
User device can control following basic motions/parameters through instructions in real-time:
direction, speed, angular displacement, phase current, micro-stepping, and enable/disable
the H-bridge, etc. Speed input range is 0 ~ 65,000 pulses/sec, and angular displacement
input range is 0 ~ 2,000,000,000 pulses.
1.1.3 Absolute Position Counter
1.1.4 Real-time Change Notification (RTCN)
Similar to CPU’s interrupters, UIM242XX can automatically generate certain messages after predefined events, and sends them to the user device. The time is less than 1 millisecond from the occurring of the event to the message being sent. Message transfer time depends on the baud rate of the RS232 setup of the UIM2501. The transfer time will be less than 0.5 milliseconds if the baud rate is set to 115200.
UIM242XX’s RTCN system supports 12 events: displacement control done, absolution zero
position, sensor 1/2/3 rising edge, falling edge, analog input beyond upper threshold, analog input lower than lower threshold, and TTL status etc. All RTCNs can be enabled or disabled by instructions.
Sensor Input Control Module
UIM242XX’s Sensor Input Control Module supports 3 channels of TTL input or 1 channel digital and 1 channel analog input. User instruction can configure the input type. On board Analog to Digital (ADC) converter is of 12bits accuracy, 50K Hz sampling rate. The analog input is further averaged over 16 samples before output top user. The update rate is 1K Hz. For digital inputs, user can configure the desired action and REMF when each sensor’s status (sensor events) changes. There are 5 actions that can be bound to 8 sensor events:
1. Start running according the user preset speed and acceleration/deceleration rate. Direction is determined by the sensor voltage level.
2. Sudden stop.
3. Decelerate to stop.
4. Reset absolute position counter.
5. Processing displacement control using the motion parameters preset by the user. (e.g. SPD, STP, acceleration/deceleration, maximum start speed, maximum diminish speed, etc.)
TTL Output Control Module
UIM242XX’s TTL Output Control Module supports 1 channel of TTL voltage level output. The output port P4 is capable of providing 20mA sourcing or sinking current. In practice, please keep the current consumption as low as possible to prevent overheating the controller. The output level can be controlled by:
1. User instruction
2. One of the following events:
a) Run/Stop status
b) Direction change
c) Origin point hit

Contact Supplier

You May Like
New Products


















Popular Searches
Recommended Products
Find Similar Products By Category





 Facebook
Facebook
 X
X
 Pinterest
Pinterest
 Linkedln
Linkedln