Serial 6 ais accelerometer / gyroscope MPU6050 module, Calman filter, angle output
USD $1 - $100 /Piece
Min.Order:1 Piece
Shenzhen Huachengweiye Electronics Co., Ltd.

JM100-W building block networking module free cloud platform WiFi module remote monitoring


CH376S evaluation board U disk SD mouse support parallel serial SPI interface

STC offline download U disk version of U7 support for 3.3V and 5V automatic / offline download

Industrial DKC-1A stepper motor controller / pulse generator / servo / potentiometer speed control

Guangzhou Huanghua electric iron 905C adjustable constant temperature electric iron 60W 100%
Product Details
FlYing four ais tYpe, self balanced vehicle optimal sensor scheme, some children's shoes said, no magnetic field sensor, there is no pressure sensor, can do four ais aircraft? Isn't the Yaw ais drift over time? I want to tell You is, the magnetic field and the pressure is chicken ribs for details, see the description at the end of the correlation analYsis.
Latest update software, support 51/AVR/Arduino/STM8/STM32, such as a varietY of single-chip.
The module comes with a voltage stabiliZing circuit, which can be compatible with the 3.3V/5V embedded system.
Module retains the I2C MPU6050 interface to meet the needs of high-level users want to access the underlying measurement data.
The use of advanced digital filtering technology, can effectively reduce the measurement noise, improve the measurement accuracy.
Internal module is integrated with the attitude solver, with the dynamic Kalman filtering algorithm, can under the dynamic environment accurate output module of current attitude, attitude measurement accuracy is 0.01 degree, high stability performance even better than some of the professional inclinometer.
Using the stamp hole gold plating process, quality assurance, can be embedded in the user's PCB board.

The volume is less than a 1 coin size, the thickness of the module 2mm, stamp hole design can be embedded into the user's circuit board.
Data download address:
/s/1tIqp1
Copy to the address bar to open
PC can not run the user please download and install framework4.0.Net:
/zh-cn/download/details.asp? Id=17718?
Module parameters:
1, voltage: 3V~6V
2, current: <10mA
3, volume: 15.24mm 2mm 15.24mm
4, pad spacing: up and down 100mil (Two54mm), about 600mil (15.24mm)
5, measurement dimension: acceleration: 3 dimensions, angular velocity: 3 dimension, attitude angle: 3 dimension
6, range: acceleration: + / - 2G, angular velocity: + 250 degrees /s.
7, resolution: acceleration: 6.1e-5g, angular velocity: 7.6e-3 degrees /s.
8, stability: acceleration: 0.001g, angular velocity of 0.02 degrees /s.
9, attitude measurement stability: 0.01 degrees.
10, the data output frequency 100Hz (115200 baud) /20Hz (baud rate 9600).
11, data interface: serial port.TTL levelI2C (direct connect MPU6050, no attitude output)
10, the baud rate is 115200kps/9600kps.
11, to provide eamples of single-chip code analysis.
Perfect host computer program:
Acceleration measurement curve (static):
Angular velocity measurement curve (static)
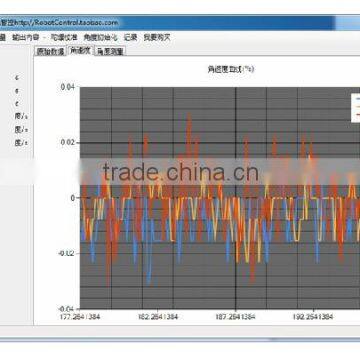
Angular output after Calman filtering (static):
(Note: the rolling curve is blue, is located at the top of the image with a vertical ais of 0.2.
Recording measured data using host computer:
Communication protocol:
Level: TTL 3.3V/5V level.
Baud rate: 115200/9600, 1 stop bits, parity bit 0.
Instruction content | function | remarks |
052 | Angle initialization | sendZShaft angle to zero |
061 | Using the serial port, disableI2C | Power down save, it is recommended to use the host computer to modify |
062 | Disable serial port, useI2CInterface | Power down save, it is recommended to use the host computer to modify |
063 | baud rate115200Frame rate.100Hz | Power down save, it is recommended to use the host computer to modify |
064 | baud rate9600Frame rate.20Hz | Power down save, it is recommended to use the host computer to modify |
eplain
1. module power after the need to remain at rest, the internal module of MCU will in static module for automatic calibration (to eliminate gyroscope zero drift), after calibration Z ais angle will re initialized to 0, Z ais angle output is 0, visual for the completion of the automatic calibration of signal.
2.The factory default settings using the serial port, baud rate115200Frame rate.100Hz. Configuration can be configured through the PC software, because all of the configuration is power down save, so just configure once on the line.
Acceleration output:
Data number | Data content | meaning |
0 | 055 | Baotou |
1 | 051 | Identify the package is the acceleration package. |
2 | AL | Ais acceleration low byte |
3 | AH | Ais acceleration high byte |
4 | AyL | yAis acceleration low byte |
5 | AyH | yAis acceleration high byte |
6 | AzL | zAis acceleration low byte |
7 | AzH | zAis acceleration high byte |
8 | TL | Low temperature byte |
9 | TH | Temperature high byte |
10 | Sum | Check and |
Angular velocity output:
Data number | Data content | meaning |
0 | 055 | Baotou |
1 | 052 | Identify the package is angular speed package |
2 | WL | Low angle speed byte |
3 | WH | Ais acceleration high byte |
4 | WyL | yAis acceleration low byte |
5 | WyH | yAis acceleration high byte |
6 | WzL | zAis acceleration low byte |
7 | WzH | zAis acceleration high byte |
8 | TL | Low temperature byte |
9 | TH |
Contact Supplier

You May Like
New Products


















Find Similar Products By Category





 Facebook
Facebook
 X
X
 Pinterest
Pinterest
 Linkedln
Linkedln